燃料電池電動汽車整車控制器VCU(VehicleControlUnit)是整個汽車的核心控制部件,它采集加速踏板信號、制動踏板信號及其他部件信號,并做出相應判斷后,控制下層的各部件控制器的動作,驅動汽車正常行駛。因此VCU的優劣直接影響著整車性能。
燃料電池電動汽車整車控制器的研制是“十五”期間國家電動汽車重大專項的關鍵單元技術之一。這些關鍵單元技術的基礎研究,對于搶占新一代電動汽車制高點、促進我國汽車工業實現跨越式發展具有重要意義。
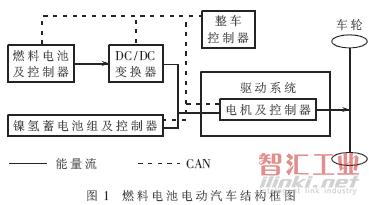
1燃料電池電動汽車結構
燃料電池電動汽車結構框圖如圖1所示,它由整車控制器、燃料電池及其控制器、鎳氫蓄電池組及其控制器、驅動系統、車輪等部件組成,各部件通過CAN(ControllerAreaNetwork)總線組成一個分布式控制系統。燃料電池電動汽車采用主輔雙動力源形式:燃料電池作為主動力源,提供汽車行駛的主要動力;鎳氫蓄電池組是輔助動力源,在汽車行駛中起到“削峰填谷”的作用。
2整車控制器硬件功能電路設計
2.1整車控制器功能需求分析
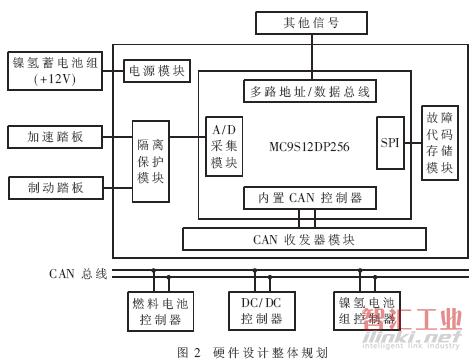
整車控制器相當于汽車的大腦,它在汽車行駛過程中執行多項任務,具體功能包括:(1)接收、處理駕駛員的駕駛操作指令,并向各個部件控制器發送控制指令,使車輛按駕駛期望行駛。(2)與電機、DC/DC、鎳氫蓄電池組等進行可靠通訊,通過CAN總線(以及關鍵信息的模擬量)進行狀態的采集輸入及控制指令量的輸出。(3)接收處理各個零部件信息,結合能源管理單元提供當前的能源狀況信息。(4)系統故障的判斷和存儲,動態檢測系統信息,記錄出現的故障。(5)對整車具有保護功能,視故障的類別對整車進行分級保護,緊急情況下可以關掉發電機及切斷母線高壓系統。(6)協調管理車上其他電器設備。
針對整車控制器的各項具體功能,進行了如圖2所示的硬件設計整體規劃、MCU的選型以及各個功能電路的設計。
2.2MCU的選擇
MCU是整車控制器的核心,它負責數據的采集和處理、邏輯運算以及控制的實現等,MCU的選取是整個硬件設計過程中最重要的任務。Motorola公司的HCS12系列16位單片機 MC9S12DP256,在運算能力、存儲空間、數字量模擬量輸入輸出以及CAN通訊等方面均有上乘表現,并具有較高的性價比,使其非常適合用于一些中高檔汽車電子控制系統。
這款單片機具有預算能力強、存儲空間大、接口資源豐富等諸多特點[1]:
(1)采用STAR12CPU,核心運算能力可以達到50MHz,總線速度可以達到25MHz,采用優化的指令集,使指令的運算速度得到很大提高。
(2)片內集成了256KBFLASH,12KBRAM和4KBE2PROM,完全可以滿足程序對存儲空間的要求。
(3)諸多對外接口,包括五路兼容CAN2.0A/B協議的CAN接口、兩路異步串行通訊接口、三路同步串行通訊接口、十六路10位A/D接口、一路I2C總線接口、49個獨立數字I/O口(其中20個具有外部中斷及喚醒功能)、8通道輸入捕捉/輸出比較等。
2.3VCU硬件電路設計
整車控制器是一個多輸入、多輸出、數模電路共存的復雜系統,其各個功能電路相對獨立。因此,按照模塊化思想設計了硬件系統的各個模塊,主要包括:最小應用系統模塊,電源模塊,CAN通訊模塊,串口通訊模塊,數模輸入輸出模塊。
2.3.1電源模塊
整車控制器的供電電源來自燃料電池電動汽車的鎳氫蓄電池組,其標定電壓+12V。汽車在運行過程中,鎳氫蓄電池組的電壓不穩定,波動非常大,高壓時可達到+17V,低壓時只有+9V。電源電壓的不穩定將直接導致整車控制器工作不正常。因此,在電源模塊的設計過程中,采用了寬輸入范圍,高輸出精度,大功率的DC/DC電源芯片。另外,由于整車控制器里所使用芯片的供電電壓包括了+5V和+12V兩種,所以設計時使用了兩款DC/DC芯片:Infineon公司的TLE4270以及NationalSemiconductor公司的LM2940S-12,其分別具有12V-12V和12V-5V的變壓穩壓作用,并具有短路、過壓、過流及溫度過載保護等功能。通過使用這兩款芯片及其外圍的一些輔助電路(主要是濾波電路),使得電源模塊供電穩定可靠。
2.3.2CAN通訊模塊
由于MC9S12DP256片內集成了五路兼容CAN2.0A/B協議的CAN模塊,所以整車控制器的CAN通信模塊不需要添加片外的CAN控制器,只需外加CAN收發器。所設計的CAN通訊模塊采用了PHILIP公司的TJA1040收發器芯片。該芯片的波特率范圍是60kbps~1Mbps,它具有一個溫度保護電路,當與發送器連接點的溫度超過大約165℃時,會斷開與發送器的連接(當總線短路時,更需此溫度保護電路)[2]。
為了增強CAN總線節點的抗干擾能力,主芯片的CANTXD和CANRXD引腳并不是直接與TJA1040的TXD和RXD兩引腳相連,而是通過高速光耦HCPL-0630后,與TJA1040相連。這樣,當總線上有多個CAN節點時,可實現各CAN節點間的電氣隔離。TJA1040與CAN總線的接口部分也采取了一定的安全和抗干擾措施:
(1)TJA1040的CANH和CANL引腳各自通過一個5Ω的電阻與CAN總線相連,電阻可起到一定的限流作用,保護TJA1040免受過流的沖擊。
(2)CANH和CANL與地之間并聯了兩個30pF的小電容,可以濾除總線上的高頻干擾,并且有一定的防電磁輻射能力。
(3)在兩根CAN總線接入端與地之間分別反接了一個保護二極管,當CAN總線有較高的負電壓時,通過二極管的短路可起到一定的過壓保護作用。
2.3.3數模輸入輸出模塊
在燃料電池電動汽車運行過程中,整車控制器經常要發出一些車輛的啟動/停止、鎳氫蓄電池組的閉合/斷開等信號,即數字量的輸出。為保證信號穩定可靠,整車控制器置有四路數字量輸出,并且都大于50mA。設計時采用了繼電器方式的開關量輸出,該方式是目前最常用的一種輸出方式。所采用的繼電器芯片是Infineon公司的BTS824R,其特點如下[3]:
(1)寬電壓范圍輸入,兼容CMOS和TTL電平。
(2)加強型電磁兼容設計。
(3)自帶短路保護,過載保護,ESD保護。
(4)自帶過溫切斷保護。
整車控制器在發出開和關信號的同時,也在接收相應的數字信號。在主芯片MC9S12DP256和外面信號之間采用高速光耦HCPL-0630連接的方式實現電平轉換以及信號隔離。
3整車控制器可靠性設計及測試
整車控制器在功能完善的基礎上,可靠性是其質量好壞的主要技術指標。在燃料電池電動汽車整車控制器的工作環境中,電機、變頻器和鎳氫蓄電池組傳輸的母線電流變化較大(特別是當變頻器進行高頻調制時),產生的空間電磁干擾很強;另外,其工作空間的溫度變化范圍廣、振動強度大。以上種種不利因素對整車控制器可能造成的干擾后果主要表現在下述幾個方面:
(1)數據采集誤差加大。
(2)控制狀態失靈。
(3)數據受干擾發生變化。
(4)程序運行失常。
為保證整車控制器運行正常,此次的可靠性設計采用了元器件級可靠性設計和系統級可靠性設計相結合的方法,具體表現在:芯片的溫度范圍控制、部件的冗余設計、系統的電磁兼容性設計等。
3.1芯片的溫度范圍
在整車控制器的設計中,絕大多數芯片溫度范圍是汽車級(-40℃~+125℃),其他極少數芯片因為價格原因選擇工業級(-40℃~+85℃)。
3.2冗余設計
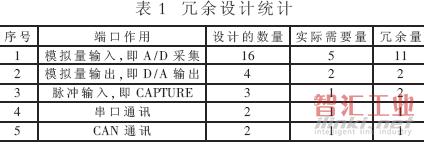
冗余設計是指通過在系統結構上增加冗余資源來減小故障造成的影響,或將故障隔離并校正錯誤,使得系統即使發生了故障或差錯,其功能仍不受影響的技術[4]。本冗余設計采用增加功能電路的數量來實現,整體冗余量達50%以上,如表1所示。
3.3電磁兼容性設計
由于整車控制器應用環境比較惡劣,干擾嚴重,存在多種噪聲和耦合方式,所以電磁兼容性設計在所有可靠性設計中占有很重要的地位。設計中采取了濾波技術、去耦電路、屏蔽技術、隔離技術和接地技術等抗干擾技術[5][6],具體如下:
(1)選用集成度高的元器件。可以降低電路板元器件的數目,使電路板布局簡單,減少焊盤和連線,因而可以大大減少受干擾的概率,增加電路板的抗干擾能力。
(2)加粗電源線和地線,數據線、地址線及控制線盡量短,以減少對地電容。
(3)數字電路和模擬電路分區布置,并加入濾波和去耦電路。
(4)采用四層電路板的設計。相對于兩層板而言,有獨立的地平面和電源平面,并且信號線和地線間距可以很緊密,因此能有效減小共模阻抗和感性耦合。
(5)采用敷銅技術。既減小回路面積(因而減小了輻射),又可以減小導線之間的串擾。
3.4可靠性測試
吉林大學汽車動態模擬國家重點實驗室對所開發設計的整車控制器做了初步的可靠性測試。測試過程如下:
(1)高低溫測試:在低溫-25℃、高溫125℃中分別保持6個小時。
(2)振動測試:掃描頻率范圍17~200Hz,最大振幅0.78mm,在60~200Hz時加速度50,一次掃描時間15min。
(3)電磁兼容性測試:利用實車簡單模擬各種汽車電磁干擾工況,做初步測試。
在整個測試過程中,整車控制器工作正常,未出現復位現象,各功能模塊發送、接收數據正常。在振動測試時,元器件無脫落及損壞現象。
4整車臺架試驗
在進行了可靠性測試之后,將整車控制器與燃料電池及其控制器、電機及其控制器、鎳氫蓄電池組及其控制器等部件連接在一起,實現了整個燃料電池電動汽車的動力總成試驗臺架。在臺架上做了以下的試驗:
(1)通信聯調試驗:控制系統CAN通訊試驗;數據監控系統的信號采集。
(2)整車控制器控制邏輯試驗:按照與實際車輛相同的駕駛模式,重點進行加速模式、啟車模式、充電模式、再生制動模式、動力蓄電池充電模式、巡航行駛模式的控制邏輯單模式調試。
(3)整車控制器控制報警試驗。
(4)整車控制器控制模式切換試驗:重點考核各種控制模式間的切換。
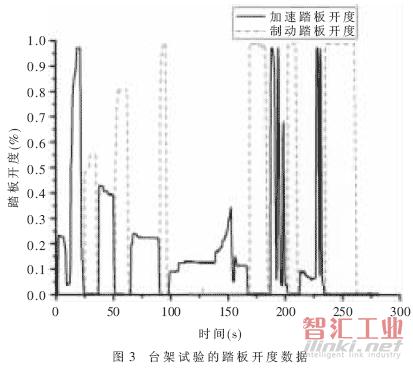
在整個臺架試驗測試過程中,整車控制器運行穩定,各功能模塊按照指定程序完成任務,未出現復位及數據丟失現象。圖3是試驗過程中采集的踏板開度信號,所采集的信號連續完整。整車控制器不僅在功能上實現了既定目標,而且在可靠性方面也達到了標準。
所研制的用于燃料電池電動汽車的整車控制器,不僅實現了所需功能,而且具有良好的可靠性和工程實用性。其中一些重要電路模塊的設計以及系統可靠性設計所采用的方法,為今后各類電動汽車控制器的開發起到了奠基工作。
(審核編輯: 智匯小新)
分享



